O que é o MCP2515?
O MCP2515 é um controlador autônomo do protocolo Controller Area Network (CAN) desenvolvido pela Microchip. Ele implementa totalmente a especificação CAN 2.0B, fornecendo uma solução de comunicação via barramento CAN confiável, flexível e econômica para sistemas embarcados por meio de uma interface SPI de alta velocidade.
Especificações técnicas centrais do MCP2515
- Protocolo CAN: compatível com CAN 2.0B
- Bitrate máximo: 1 Mbps
- Interface com MCU: SPI (até 10 MHz)
- Tensão: 2,7V - 5,5V
- Corrente típica: 5 mA (ativo), 1 µA (standby)
- Buffers de recepção: 2
- Buffers de transmissão: 3
- Filtros / Máscaras: 6 / 2
- Temperatura de operação: -40°C a +125°C
Diagrama de arquitetura interativo
Passe o mouse sobre um módulo para ver detalhes
Aspecto físico e pinagem (pinout)
Uma foto do chip e um diagrama de sua configuração de pinos.

CI MCP2515 | Foto: Microchip

Diagrama de pinos do controlador CAN autônomo MCP2515
Como funciona internamente
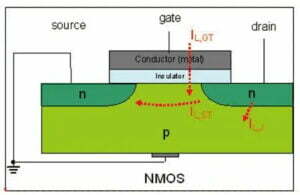
O MCP2515 simplifica a comunicação CAN para microcontroladores que não têm um módulo CAN nativo. Ele atua como intermediário, lidando com as tarefas complexas do protocolo CAN para que a MCU precise apenas enviar e receber dados via SPI. O clock interno do MCP2515 sincroniza com o barramento, e seu hardware dedicado gerencia a temporização de bits, a checagem de erros e o buffering de mensagens, reduzindo significativamente a carga de processamento da MCU.
Guia para iniciantes e hobbyistas
Esta seção orienta você nas conexões básicas de hardware e na programação para usar o MCP2515 com Arduino ou ESP32.
Conexão de hardware e fiação
Aqui está um diagrama de ligação típico para conectar um módulo MCP2515 a um Arduino Uno. Lembre-se: são necessários dois resistores de terminação de 120Ω nas extremidades físicas do barramento CAN.

Diagrama de ligação: Arduino Uno com módulo CAN MCP2515
Pinagem do módulo MCP2515:
- VCC: alimentação (5V)
- GND: terra
- CS: Chip Select do SPI (ex.: Arduino D10)
- SO: saída de dados SPI (MISO, ex.: Arduino D12)
- SI: entrada de dados SPI (MOSI, ex.: Arduino D11)
- SCK: clock SPI (ex.: Arduino D13)
- INT: interrupção (opcional, ex.: Arduino D2)
- CAN_H / CAN_L: linhas high/low do CAN
Software: envio e recepção
Os trechos abaixo demonstram como enviar e receber uma mensagem simples usando a biblioteca mcp2515.
Inicialização e envio
#include <mcp2515.h>
#include <SPI.h>
#define CAN_INT 2
#define CS_PIN 10
MCP2515 mcp2515(CS_PIN);
void setup() {
Serial.begin(115200);
SPI.begin();
if (mcp2515.reset() != MCP2515::ERROR_OK) {
Serial.println("Erro ao inicializar o MCP2515");
while(1);
}
if (mcp2515.setBitrate(CAN_125KBPS) != MCP2515::ERROR_OK) {
Serial.println("Erro ao configurar o bitrate");
while(1);
}
}
void loop() {
CanMessage msg;
msg.id = 0x123;
msg.data[0] = 0xAA;
msg.data_length_code = 1;
mcp2515.sendMessage(&msg);
Serial.println("Mensagem enviada!");
delay(1000);
}Recebendo uma mensagem
#include <mcp2515.h>
#include <SPI.h>
#define CS_PIN 10
MCP2515 mcp2515(CS_PIN);
void setup() {
// ... (mesmo que acima)
}
void loop() {
CanMessage msg;
if (mcp2515.readMessage(&msg) == MCP2515::ERROR_OK) {
Serial.print("ID recebido: 0x");
Serial.print(msg.id, HEX);
Serial.print(", Dados: ");
Serial.println(msg.data[0], HEX);
}
delay(10);
}Explicação das funções
mcp2515.reset(): inicializa o chip em um estado conhecido. É essencial para garantir que o MCP2515 esteja pronto para ser configurado, atuando como um “reboot” por software da lógica interna. Deve ser a primeira função chamada após o construtor.
mcp2515.setBitrate(): configura a velocidade do barramento CAN. Recebe uma constante predefinida como CAN_125KBPS ou CAN_500KBPS e calcula os valores corretos dos registradores de temporização (CNF1, CNF2, CNF3) para coincidir com o bitrate alvo e a frequência do oscilador, garantindo comunicação confiável entre todos os nós.
Polling vs. interrupções
A função loop() no código de recepção usa polling chamando repetidamente mcp2515.readMessage(). É simples, porém pode ser ineficiente, pois a MCU fica verificando por novas mensagens mesmo quando não há nenhuma. Um método mais eficiente é usar uma abordagem orientada a interrupções. Ao conectar o pino INT do MCP2515 a um pino de interrupção da MCU, o chip sinaliza a MCU apenas quando chega uma nova mensagem, permitindo que a MCU execute outras tarefas enquanto aguarda.
Para engenheiros profissionais
Uma análise mais profunda sobre integrar o MCP2515 em projetos profissionais, comparações de desempenho e cálculos de parâmetros-chave.
MCP2515 vs. controlador CAN nativo
Compare o MCP2515 com controladores CAN on-chip (ex.: em um STM32) para ajudar na escolha da tecnologia.
Calculadora de bit timing
Um bit timing preciso é crucial para uma rede CAN estável. Esta ferramenta ajuda você a calcular rapidamente os valores dos registradores CNF1/2/3 para seu setup.
Aplicações práticas e solução de problemas
Explore casos reais e aprenda a diagnosticar e resolver problemas comuns com o MCP2515.
Estudos de caso
Projeto de automação industrial
Comunicação CAN em tempo real entre múltiplos nós de sensores e um controlador central para transmitir dados ambientais em uma fábrica inteligente. O MCP2515 foi pareado com um microcontrolador STM32 para atender requisitos exigentes de velocidade e confiabilidade. Foram resolvidos problemas de ruído na alimentação e configuração incorreta de filtros.
Comunicação com ECU automotiva
Desenvolvimento de uma ferramenta de diagnóstico personalizada para o CAN de um veículo. A ferramenta usa o MCP2515 para ler e enviar mensagens de diagnóstico para várias ECUs (Unidade de Controle do Motor, ABS). O projeto exigiu lidar com frames CAN padrão e estendidos, além de gerenciar prioridades de mensagens para registro de dados em tempo real.
Rede de sensores para agricultura inteligente
Uma rede distribuída de sensores de umidade do solo, temperatura e luz implantada em uma grande fazenda. Cada nó usa um MCP2515 para se comunicar com um gateway central. O baixo consumo e a robustez da comunicação do MCP2515 foram críticos para nós alimentados por bateria e comunicação a longa distância.
Guia interativo de troubleshooting
Possíveis causas:
- Interferência por ruído na alimentação.
- Falta de resistores de terminação de 120Ω nas extremidades do barramento.
- Incompatibilidade de baud rate entre os nós da rede.
Soluções:
- Adicionar mais capacitores de desacoplamento próximos aos pinos VCC e GND.
- Garantir que exista um resistor de 120Ω em cada extremidade física do barramento.
- Verificar e padronizar a configuração de baud rate em todos os nós.
Possíveis causas:
- Filtro ou máscara de recepção configurado incorretamente, filtrando todas as mensagens.
- O MCP2515 entrou em estado "Bus-Off" devido a muitos erros.
- Fiação incorreta, principalmente as linhas MISO/MOSI.
Soluções:
- Desativar temporariamente os filtros para testar a conectividade.
- Verificar registradores de contadores de erro e fazer reset por software ou hardware se necessário.
- Verificar cuidadosamente as conexões do barramento SPI.
Possíveis causas:
- O pino CS (Chip Select) do SPI está mal configurado ou não é acionado corretamente.
- A velocidade do clock SPI excede a especificação do MCP2515 (10MHz).
- Tensão de alimentação instável ou insuficiente.
Soluções:
- Confirmar que o pino CS no código corresponde ao hardware e usar um osciloscópio para verificar níveis lógicos.
- Reduzir a frequência do clock SPI do microcontrolador.
- Garantir uma alimentação estável e limpa para o MCP2515.